Blog
HAI / HAIS 2018 にて発表してきました
AI Lab 接客対話グループの馬場です。
今年度、大阪大学との共同研究講座で進めてきた研究について、昨年12月に開催された HAI 2018、そして先週開催された HAI シンポジウム 2018 にて発表してきましたので、今回はその様子をレポートしたいと思います。
HAI 2018
HAI はその名の通り、ヒューマンエージェントインタラクションに関する国際会議です。あらゆる知的システムと人とのインタラクションにフォーカスした会議で、今回は6回目の開催です。海外での開催でしたが、日本から多くの研究者・学生が参加しており、とても活気のある会議でした。

今回の会議には、
- ホテルおもてなしロボットの研究 と、
- 感情制御チャットボットの研究
が採択されました。ここで、その研究について簡単にご紹介します。
ホテルロボット
AI Lab 接客対話グループでは、2018年4月から大阪大学と東急不動産R&Dとの共同研究を進めていて、ホテルでのおもてなしロボットの実証実験に取り組んできました。
ロボットがホテルで温かくもてなすことで、ホテルへの満足度の向上が期待できるだけでなく、そのロボットへの信頼から、ロボットが提供する情報を受け入れやすくなるのではないか、という仮説を立てています。
その基礎的な調査として、ホテルの共用部にロボットを置き、人を検知すると声かけをする、という実験を行いました。半プライベートな空間であるホテルで、ロボットから話しかけられることを宿泊客はどう感じるのかを調べることが目的です。
実験の結果、多くの宿泊客がロボットの声かけに対し肯定的に捉えていることがわかりました(下図)。
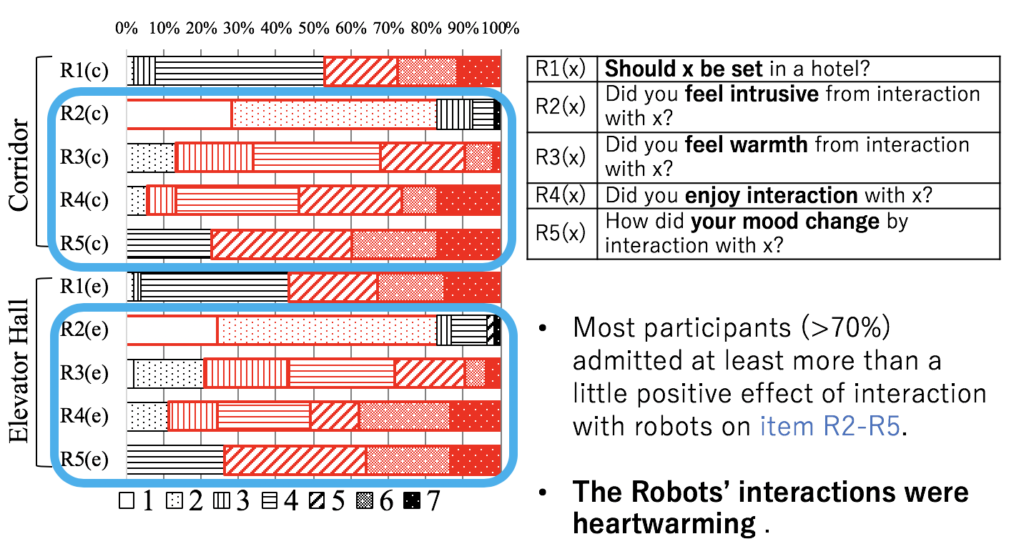
(発表スライドより引用)
特に面白かったのは、宿泊日数とアンケートの回答に正の相関が見られたこと。長く宿泊すればするほど、アンケートで良い回答をしていることになります。これは「ロボットがいる」という真新しさから良い回答をしているのではなく、長くロボットと接する人ほどその声かけに温かさを見出しているのだと考えることができ、ホテルへのロボット導入の可能性を見出せる結果だと感じています。
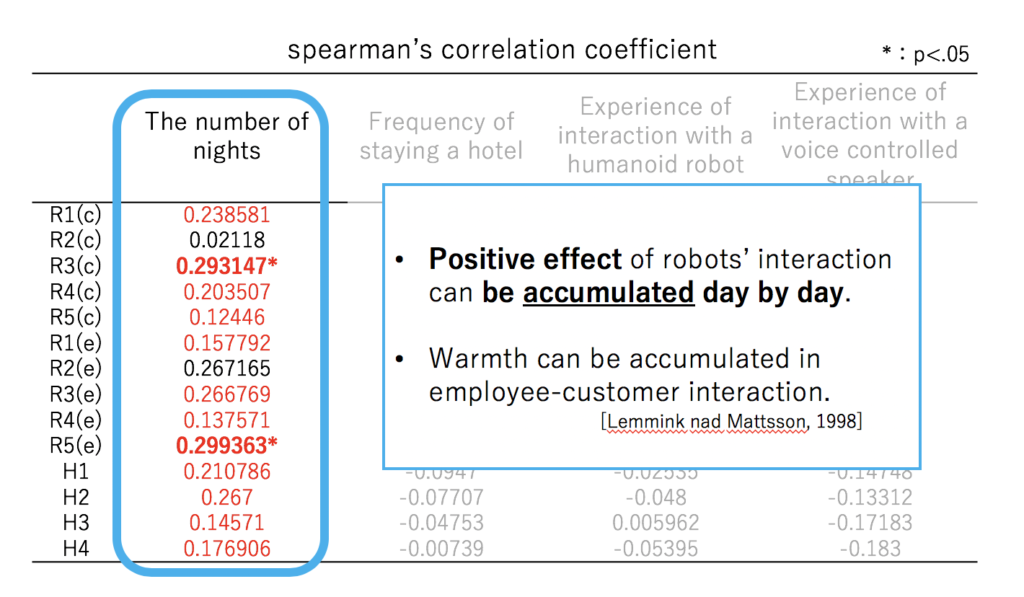
(発表スライドより引用)

(中西先生(特任助教)による発表 in HAI 2018)
感情制御チャットボット
カスタマーサポート業務は感情労働と呼ばれ、悪質なクレーマ対応などによりオペレータに精神的な負荷を強いることが多く、韓国では自殺が多発するなど社会問題に発展してきています。
また、これまでのカスタマーサポートは電話やメールが主流でしたが、2016年ごろからチャットによるサポートを提供する企業が増加しており、チャットボットを活用できる機会が増えてきました。
こうした背景から、感情、特にここでは怒りの感情に着目し、チャットボットによってユーザの怒りを軽減しようと考えました。怒っているユーザとなだめるオペレータという二者のやりとりにせず、そこにチャットボットを介入させ、一緒になって怒ったり途中で折れたりすることで、場の流れや認知的なバランスを変化させ、怒りを抑えてもらおうというアイデアです。
実験の結果としては、ユーザの怒りを有意に下げる効果は確認できませんでしたが、介入するチャットボットを味方だと思ってもらうことに成功しました。この技術は、二者間対話を三者間対話に自然に持っていく際に非常に有用なものになると考えています。
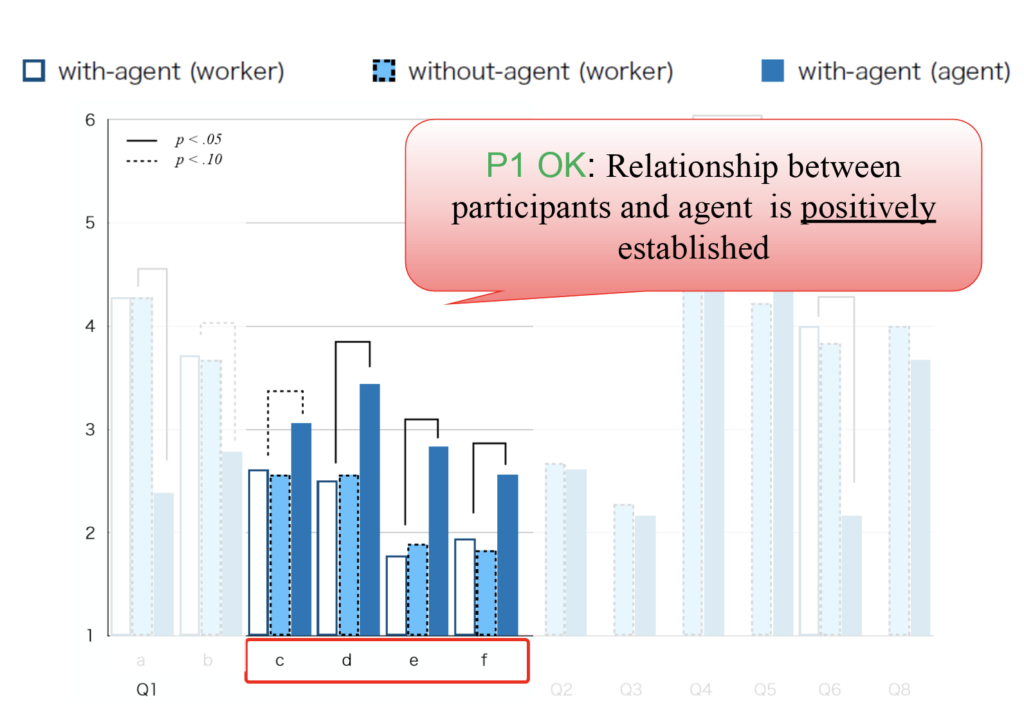
(発表スライドより引用)

(倉本先生(特任准教授)による発表 in HAI 2018)
HAI シンポジウム 2018
HAIシンポジウム(HAIS)は、2006年に開催されて以来、今回で13年目の実施になる会議です。
国際会議の HAI よりも歴史が古く、毎年150名近くのHAI研究者が参加しており、活発に議論できる環境でした。
空間全体とのインタラクションや、ロボット vs バーチャルエージェントの比較など、様々な先進的な研究が議論されました。
接客ロボットのための人の顔位置予測
顔位置予測のテーマは、博士課程向けインターンシップに参加してくれた岡藤くんに取り組んでもらっていたテーマで、今回はその成果をまとめてポスター発表してもらいました。
卓上型ロボットで通行人への声かけを行うためには、人の位置の検知が必要です。人の検知自体は深層学習の発展により高精度に高速で行えるようになりました。しかし、ホテルでの実験でもよく起きた現象なのですが、人を認識したタイミングで「声かけ開始!」とロボットに指示を出してから、ロボットが動き始め実際に発話を行うまでに時間がかかります。ひどい時には1秒程度かかってしまい、人が完全に通り過ぎてから挨拶をすることも多々ありました。これは、ロボットの機械的な遅れに起因するもので、動作の処理が複雑になればなるほど遅れが増えます。
そこで、ロボットの機械的な遅れは起きるものと考え、人の位置を予測し、未来の位置をロボットに与えることで、遅れを軽減させようというアイデアを実現したものが本研究です。
なるべく頑健に予測するために、OpenPose や YOLO など複数の人認識モデルを並列で用いて予測するモデルを組みました。結果として、ロボットの遅れを軽減することができ、その様子をポスター発表としてデモンストレーションしました。
非常に光栄なことに、全38件のポスター発表の中から最優秀ポスター賞を受賞しました。ロボットを実社会に入れる際に避けては通れない重要な課題であると共感してもらえた結果ではないかと考えています。
#HAIシンポジウム2018 にて最優秀ポスター賞受賞しました!👏🥳🤗
研究テーマは
「ヒューマノイドロボットのための顔位置予測を用いた人の顔追従制」AI Labに来ていた博士インターン生の研究成果です✨すごい😆
明日から始まる #HRI2019 @韓国での発表も期待です!
#HAI2019 #最優秀ポスター賞 pic.twitter.com/ehL61ReK5u
— CyberAgent アドテクスタジオ広報担当 (@ca_adtechstudio) March 10, 2019
おわりに
大阪大学との共同研究を開始してから取り組んできた研究たちを、国際会議や国内シンポジウムに研究論文として対外的に発表できるところまで持っていけて良かったと感じています。また、HAIコミュニティには温かく活発な研究議論の場を提供いただき、多大に感謝しております。運営の方々に改めてお礼申し上げたいと思います。
これからも社会実装に重きを置きながら実証実験を繰り返し、その成果を論文として発表し対外的なフィードバックをもらうサイクルを強めていきたいと思います。
Author